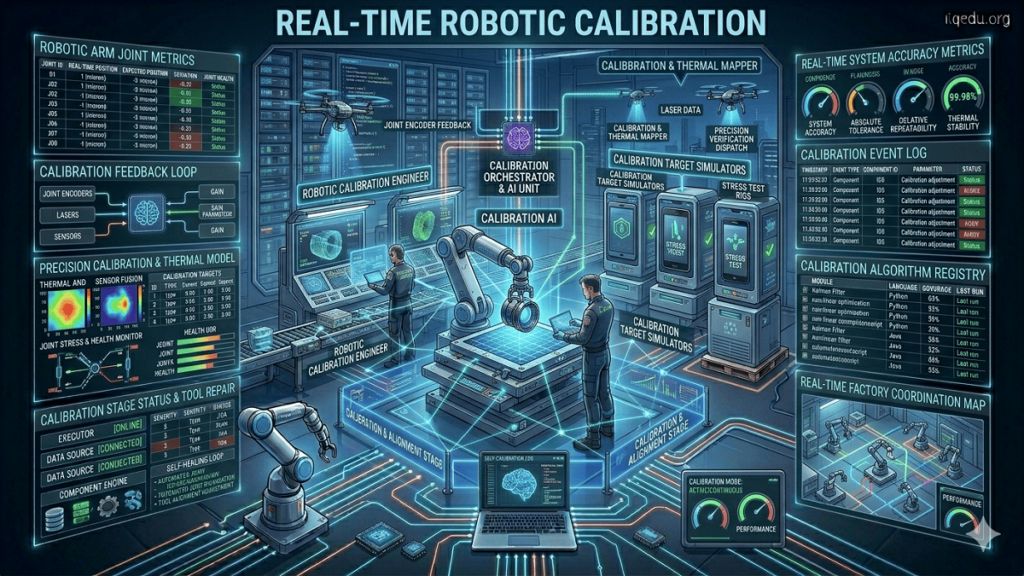
Real-time Robotics Calibration
Real-time robotic calibration refers to the process of continuously adjusting a robot’s parameters and position in real time to ensure maximum accuracy, precision, and performance during operation. Unlike offline calibration, which is performed before a task, real-time calibration allows the robot to self-correct dynamically as it performs tasks.
What Is Real-Time Robotic Calibration?
Robotic calibration is the process of aligning a robot’s actual physical movements with its programmed model to reduce errors. Real-time calibration uses sensors, feedback systems, and software algorithms to constantly monitor and adjust the robot’s position, orientation, and movements while it is operating.
Key Goals:
- Improve precision and repeatability
- Reduce cumulative errors over time
- Adapt to environmental changes or wear-and-tear
- Enhance performance in dynamic or complex tasks
How Real-Time Robotic Calibration Works
- Sensors and Feedback Systems
- Encoders, laser trackers, cameras, and force sensors capture the robot’s real-time position and movement.
- Data Processing
- The system compares the actual movements with the desired path or task parameters.
- Dynamic Adjustment
- Algorithms adjust joint positions, tool orientation, or trajectory in real time.
- Continuous Monitoring
- The system constantly updates corrections to maintain accuracy throughout operations.
Benefits of Real-Time Robotic Calibration
- High Precision: Minimizes positional and orientation errors in complex tasks.
- Reduced Downtime: Less need for manual recalibration or maintenance.
- Improved Productivity: Robots perform tasks faster and more reliably.
- Adaptability: Adjusts to changing environmental conditions or load variations.
- Enhanced Safety: Reduces risk of errors that could damage equipment or products.
Industry Applications
- Automotive Manufacturing – For precise assembly, welding, and painting.
- Electronics Production – Ensures accurate placement of micro-components on PCBs.
- Aerospace Industry – Maintains tight tolerances in component assembly.
- Medical Robotics – Supports surgical robots requiring extremely high precision.
- Logistics and Warehousing – Optimizes pick-and-place operations in dynamic environments.
Conclusion
Real-time robotic calibration is essential for modern robotics, especially in industries where precision and adaptability are critical. By continuously monitoring and correcting a robot’s movements, manufacturers and engineers can ensure high accuracy, reduced errors, and enhanced productivity.
What Is Real-Time Robotic Calibration?
Real-Time Robotic Calibration is the process of continuously adjusting a robot’s movements and parameters while it is operating to ensure maximum accuracy and precision.
Key Points:
- Purpose: To align the robot’s actual physical movements with its programmed model.
- Method: Uses sensors, cameras, encoders, and software algorithms to monitor and correct errors dynamically.
- Difference from Offline Calibration: Unlike offline calibration, which is done before operation, real-time calibration happens during the robot’s tasks.
Who Needs It
- Automotive Manufacturers
- For precise assembly, welding, and painting operations where small errors can affect product quality.
- Electronics Manufacturers
- For placing tiny components on PCBs with micrometer-level accuracy.
- Aerospace Industry
- For assembling aircraft components that require extremely tight tolerances.
- Medical and Surgical Robotics
- For robotic surgeries and medical device assembly where precision is critical.
- Logistics and Warehousing Companies
- For pick-and-place robots operating in dynamic environments where loads and positions change frequently.
In short: Real-time robotic calibration is required wherever robots must maintain high accuracy, adapt to changing conditions, and perform complex tasks reliably.
When is Real-Time Robotic Calibration required?
Real-Time Robotic Calibration is required whenever robots need to maintain high precision and adapt to changing conditions during operation.
Situations When It Is Required
- High-Precision Tasks
- When small deviations can cause defects, such as in electronics assembly or surgical robotics.
- Dynamic or Changing Environments
- In warehouses, factories, or labs where objects, tools, or the robot’s surroundings may shift during operation.
- Continuous Operation
- For robots working long hours, where mechanical wear or thermal expansion can introduce errors over time.
- Complex Multi-Axis Movements
- When tasks involve many degrees of freedom, like robotics arms performing welding, painting, or assembly.
- Quality-Critical Industries
- Automotive, aerospace, medical, and precision manufacturing industries where tolerance levels are extremely tight.
In short: Real-time robotics calibration is required whenever robots must self-correct during operation to maintain accuracy, reliability, and consistent performance.
Where is Real-Time Robotic Calibration required?
Real-Time Robotic Calibration is required in industries and environments where precision, reliability, and adaptability are critical for robotics operations.
Key Areas Where It Is Required
- Automotive Manufacturing
- For robotic welding, assembly, painting, and quality inspections.
- Electronics Manufacturing
- For precise placement of micro-components on printed circuit boards (PCBs).
- Aerospace Industry
- For assembling aircraft parts and components with extremely tight tolerances.
- Medical and Surgical Robotics
- For surgical robots and medical device assembly requiring ultra-high precision.
- Logistics and Warehousing
- For pick-and-place robots handling varying loads in dynamic environments.
- Industrial Automation & Factories
- For robots performing repetitive but precision-critical tasks where environmental changes or tool wear could cause errors.
In short: Real-time robotics calibration is required anywhere robots operate in high-precision, dynamic, or safety-critical environments.
How is Real-Time Robotic Calibration required?
Real-Time Robotic Calibration is required by implementing a continuous monitoring and adjustment system that allows robots to self-correct while performing tasks.
How It Is Implemented
1. Sensors and Feedback Systems
- Use encoders, laser trackers, cameras, or force sensors to capture the robot’s real-time position, orientation, and movement.
2. Data Processing and Analysis
- Compare the robot’s actual movements with the desired trajectory or task parameters using software algorithms.
3. Dynamic Adjustments
- Automatically adjust joint positions, tool orientation, or movement paths to correct errors immediately.
4. Continuous Monitoring
- Maintain ongoing calibration during operation to adapt to environmental changes, load variations, or mechanical wear.
5. Integration with Control Systems
- Connect calibration feedback to the robot’s motion controller or automation system for seamless correction without human intervention.
Example
In an electronics assembly line, a robotics arm placing tiny chips on a PCB uses sensors to detect even minor misalignments. The real-time calibration system automatically adjusts the arm’s position to ensure each chip is placed accurately.
In simple terms: Real-time robotics calibration is required by linking sensors, software, and control systems so robots can self-correct on the fly, ensuring high precision, reliability, and consistent performance.
Case study of Real-Time Robotic Calibration
Background
A leading electronics manufacturer faced challenges in assembling high-precision microchips on printed circuit boards (PCBs). Even minor misalignments during component placement were causing defects, leading to high rework costs and delayed shipments.
Problem
- Manual calibration and offline robot adjustments were time-consuming.
- Traditional robotic programming could not adapt to dynamic changes in PCB positioning.
- High defect rate due to misaligned components and inconsistent robotic movements.
- Delays in production and increased operational costs.
Solution: Implementing Real-Time Robotic Calibration
The manufacturer implemented a real-time calibration system for its robotics pick-and-place arms:
- Sensors and Vision Systems
- High-resolution cameras and laser sensors were installed to monitor PCB and component positions in real time.
- Data Analysis and Feedback
- Software compared the robot’s actual movements with the desired placement positions.
- Detected deviations as small as a few micrometers.
- Dynamic Adjustments
- Robotics arms automatically corrected positions and orientation on the fly.
- Adjustments occurred continuously during operation without stopping the production line.
- Integration with Automation System
- The calibration system was fully integrated with the factory’s control software to ensure seamless operation.
Results
- Reduction in defect rate by 45% due to precise component placement.
- Increased production speed by 25%, as robots required fewer stops for recalibration.
- Lower rework and material waste, saving significant operational costs.
- Improved product quality and consistency, meeting tight industry tolerances.
Conclusion
The implementation of real-time robotic calibration allowed the company to achieve high precision, improved efficiency, and cost savings. By continuously monitoring and adjusting robotics movements, the manufacturer could maintain performance even in dynamic conditions.
Key Takeaway: Real-time robotics calibration is essential for precision-critical industries, enabling robots to self-correct dynamically, reduce errors, and improve overall productivity.
White paper of Real-Time Robotic Calibration
Abstract
Real-time robotic calibration is transforming industrial automation by enabling robots to self-correct their movements dynamically, ensuring high precision, accuracy, and reliability. This white paper explores the principles, methods, benefits, and industry applications of real-time robotic calibration, highlighting its importance in modern manufacturing, electronics, aerospace, and medical sectors.
1. Introduction
Robotics systems are increasingly used in precision-critical industries. However, mechanical wear, environmental changes, and dynamic loads can introduce errors in robotics movements, affecting accuracy and productivity. Traditional offline calibration methods, performed before operations, cannot adapt to real-time deviations.
Real-time robotic calibration addresses these challenges by continuously monitoring and correcting the robot’s movements during operation, ensuring consistent performance without interrupting production.
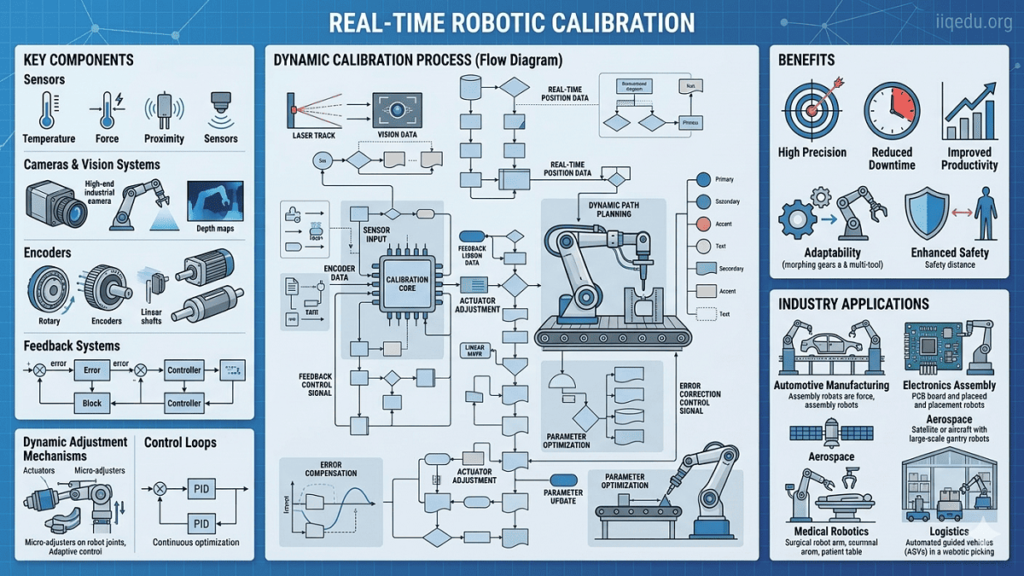
2. Key Components of Real-Time Robotic Calibration
- Sensors and Feedback Devices
- Encoders, laser trackers, cameras, and force/torque sensors capture real-time data about the robot’s position, orientation, and movement.
- Data Processing and Analysis
- Software compares actual movements with programmed trajectories and identifies deviations.
- Advanced algorithms calculate necessary adjustments.
- Dynamic Adjustment Mechanism
- Robotics controllers automatically adjust joint angles, tool orientation, or path trajectories.
- Continuous Monitoring and Feedback Loops
- Ensures ongoing calibration to adapt to environmental changes, load variations, or mechanical wear.
- Integration with Control Systems
- Calibration systems integrate seamlessly with robot controllers, PLCs, and factory automation software.
3. Benefits
- Enhanced Precision: Maintains high positional and orientation accuracy.
- Reduced Downtime: Minimizes the need for manual recalibration and maintenance stops.
- Increased Productivity: Robots operate faster with fewer interruptions.
- Adaptability: Automatically adjusts to environmental changes and load variations.
- Improved Safety: Reduces errors that could cause equipment or product damage.
4. Industry Applications
- Automotive Manufacturing – Welding, assembly, and painting operations requiring tight tolerances.
- Electronics Manufacturing – Micro-component placement on printed circuit boards (PCBs).
- Aerospace Industry – Assembly of aircraft components requiring extreme accuracy.
- Medical and Surgical Robotics – Surgical robots and medical device assembly.
- Logistics and Warehousing – Pick-and-place operations in dynamic environments.
5. Implementation Challenges
- High initial cost for sensors, software, and integration.
- Requirement for skilled personnel to configure and maintain the system.
- Data management complexity due to large volumes of real-time sensor data.
- Integration with existing robotic systems and legacy equipment.
6. Future Trends
- AI-Enhanced Calibration: Using machine learning to predict errors before they occur.
- Industrial IoT Integration: Connecting multiple robots for coordinated calibration.
- Edge Computing: Processing sensor data near the robot for faster response.
- Digital Twins: Simulating robotic operations for calibration and optimization.
- Autonomous Manufacturing: Robots self-calibrate without human supervision, enabling fully autonomous production lines.
7. Conclusion
Real-time robotic calibration is essential for industries where precision, reliability, and adaptability are critical. By combining sensors, feedback systems, and dynamic adjustment algorithms, robots can self-correct errors on the fly, improving efficiency, reducing downtime, and ensuring high-quality outputs. Organizations adopting real-time calibration gain a competitive advantage in precision manufacturing and automation.
Keywords
Real-time robotic calibration, industrial robotics, precision automation, dynamic error correction, sensor-based calibration, manufacturing automation, AI robotic calibration.
Industry application of Real-Time Robotic Calibration
Real-time robotic calibration is critical wherever precision, accuracy, and adaptability are required in robotic operations. Here are the main industry applications:
1. Automotive Manufacturing
- Applications: Welding, painting, and assembly of car components.
- Benefits: Maintains high precision for tight tolerances, reduces defects, and improves production speed.
2. Electronics Manufacturing
- Applications: Placement of micro-components on printed circuit boards (PCBs) and semiconductor assembly.
- Benefits: Reduces misalignment errors, ensures consistent placement accuracy, and lowers rework costs.
3. Aerospace Industry
- Applications: Assembly of aircraft components and precision machining of parts.
- Benefits: Ensures extremely tight tolerances and maintains safety standards.
4. Medical and Surgical Robotics
- Applications: Surgical robots and assembly of medical devices.
- Benefits: Provides ultra-high precision required for surgeries and medical equipment, enhancing patient safety.
5. Logistics and Warehousing
- Applications: Pick-and-place robots handling varying loads in dynamic warehouse environments.
- Benefits: Maintains speed and accuracy in material handling, even as conditions change.
6. Industrial Automation & Factories
- Applications: General manufacturing processes where robots perform repetitive precision tasks.
- Benefits: Adapts to wear-and-tear, environmental changes, or load variations without stopping production.
In short: Real-time robotic calibration is applied in any industry where robotic accuracy, dynamic adaptability, and consistent performance are critical for productivity, safety, and quality.
#real-timeroboticcalibrationinmumbai #real-timeroboticcalibrationinindia
Ask FAQs
What is real-time robotic calibration?
Real-time robotic calibration is the process of continuously monitoring and adjusting a robot’s movements and parameters while it operates to ensure high precision, accuracy, and reliability.
Who needs real-time robotic calibration?
Industries that require precision-critical robotic operations, such as automotive, electronics, aerospace, medical, and logistics, need real-time robotic calibration to maintain accuracy and performance.
When is real-time robotic calibration required?
It is required during high-precision tasks, dynamic or changing environments, continuous robot operation, complex multi-axis movements, and quality-critical industries.
How does real-time robotic calibration work?
Sensors, cameras, and feedback devices monitor the robot’s actual movements. Software algorithms compare these movements to desired trajectories and make automatic adjustments in real time.
What are the benefits of real-time robotic calibration?
Benefits include higher precision, reduced downtime, improved productivity, adaptability to changing conditions, and enhanced safety in robotic operations.
What is the main advantage of real-time robotic calibration?
The main advantage of real-time robotic calibration is that it allows robots to self-correct their movements dynamically during operation, ensuring high precision, consistent performance, and reduced errors without stopping production. This improves productivity, product quality, and operational safety across industries like automotive, electronics, aerospace, and medical robotics.
Source: Technologies. Hypersen
Table of Contents
Summary:
Real-time robotic calibration is a cutting-edge approach in industrial robotics that enables robots to self-correct their movements dynamically during operation. Unlike offline calibration, which is performed before tasks, real-time calibration continuously monitors a robot’s position, orientation, and performance using sensors, cameras, encoders, and feedback systems. Advanced algorithms compare actual movements with desired trajectories and make automatic adjustments, ensuring high precision and reliability.
This technology is essential in precision-critical industries such as automotive manufacturing, electronics, aerospace, medical robotics, and logistics. In these applications, even minor deviations can lead to defects, safety risks, or production delays. Real-time calibration addresses these challenges by reducing errors, minimizing downtime, and maintaining consistent product quality.
The benefits of real-time robotic calibration include enhanced accuracy, improved productivity, adaptability to dynamic environments, reduced rework, and increased operational safety. By continuously adjusting for mechanical wear, environmental changes, or load variations, robots can maintain optimal performance without manual intervention.
Overall, real-time robotic calibration is a key enabler for modern automation, allowing industries to achieve higher efficiency, better quality control, and faster production cycles. As robotics continues to evolve, real-time calibration is becoming an indispensable tool for maintaining precision, reliability, and competitiveness in automated operations.
#real-timeroboticscalibrationinvasai #real-timeroboticscalibrationinmaharashtra
Disclaimer:
This information is for educational purposes only. Always consult qualified engineers or robotics specialists before implementing real-time robotic calibration in industrial operations.






